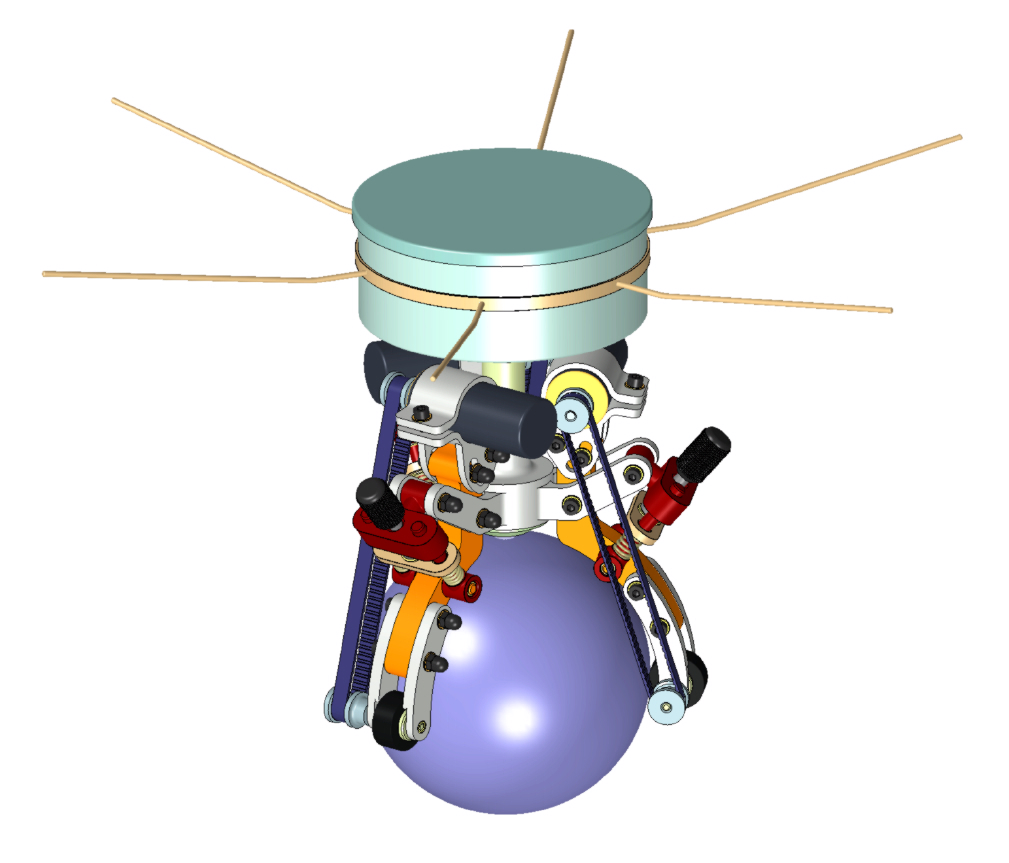
Name: Libramentum
Purpose: To balance on a ball, and use that ball as a 'wheel' for maneuvering
Design Conecept: Libramentum is being designed to provide a 'proccessor intensive' platform from which other students can design proccessing systems that will be more and more efficient at stabilising and driving the robot.
But what does this all mean?
Take a robot like R2D2. He's pretty cool right? He's solid and stable and he's not about to fall over just sitting there. But what happens when he does fall over? Now he's lying on his side and there is no way to get back onto his wheels again. What we are designing is a robot that is built onto a ball and it needs a comprehensive system to ensure that it doesn't fall over even when it's just standing still! The idea is similar to a Segway - but with an extra plane of freedom, and the robot will use a combination of accelerometers and gyroscopes along with steady drive motors and some heavy duty proccessing in order to remain upright.
The end result is a machine that will actually fight back when gravity tries to pull it to the ground - or when someone tries to knock it over. From there, the instructions required to drive Libramentum in a particular direction are calculated into the balancing routine.
 It sounds tricky, and it is. There are two of us working hard to get it built and running as well as our supervisor and another engineering student who has designed the build of the robot itself. And his supervisor. And an outside source for power supplies who helped us design a lightweight, high capacity rechargeable battery system similar to what you'd find in your mobile phone. So what have we done so far? I'll get you up to speed in the next installment but until then - watch this space!
It sounds tricky, and it is. There are two of us working hard to get it built and running as well as our supervisor and another engineering student who has designed the build of the robot itself. And his supervisor. And an outside source for power supplies who helped us design a lightweight, high capacity rechargeable battery system similar to what you'd find in your mobile phone. So what have we done so far? I'll get you up to speed in the next installment but until then - watch this space!

1 comment:
I tried Poker on KHELRAJA out of curiosity, and the experience turned out better than expected. Tables run smoothly, and game flow stays stable without interruptions. I liked how winner results and game details are clearly visible. After winning a small amount, I requested a withdrawal, and it was credited to my account without issues. Compared to other platforms, the service here feels more organized. That is why I continue using KHELRAJA for regular play.
Post a Comment